1.3 环境感知的传感器
1.环境感知传感器的类型
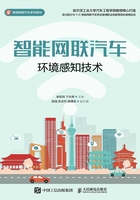
智能网联汽车环境感知传感器的类型主要有视觉传感器和雷达传感器。其中,雷达传感器又包括超声波雷达、毫米波雷达和激光雷达。毫米波雷达分为远程毫米波雷达、中程毫米波雷达和短程毫米波雷达,它们安装在汽车的不同位置,能够对车辆周围360°全覆盖检测。环境感知传感器的覆盖范围如图1-7所示。

图1-7 环境感知传感器的覆盖范围
视觉传感器一般进行短程目标探测,多用于特征感知和交通检测;超声波雷达主要对近距离目标进行检测,适用于泊车;远程毫米波雷达的信号能够透过雨、雾、灰尘等视线障碍物对远距离目标进行检测,适用于前向避险;中程毫米波雷达和短程毫米波雷达主要对中、短程目标进行检测,适用于侧向和后向避险;激光雷达多用于三维环境建立和目标检测。
2.环境感知传感器的特点
环境感知传感器分为无源传感器和有源传感器。其中,视觉传感器属于无源传感器,雷达属于有源传感器。
无源传感器能够探测环境中物体反射的现有能量,如光、辐射等。但在弱光环境下,由于没有自己的传播源,因此无源传感器的性能将有所下降。在产生的数据方面,对比有源传感器,无源传感器产生的数据量更多。
视觉传感器具有以下主要特点。
(1)涵盖整个视野宽度的高分辨率的像素和颜色。
(2)在视野中保持恒定的帧频。
(3)两个摄像头可以生成一个3D立体视图。
(4)没有发射源,减少了来自其他车辆的干扰的可能性。
(5)技术成熟,成本低。
(6)系统生成的图像便于用户理解和交互。
如果在智能网联汽车上使用无源摄像头传感器套件,需要覆盖汽车周边的各个环境,可以通过使用在特定时间间隔拍摄图像的旋转摄像头来实现,或者通过软件将4~6个摄像头的图像拼接在一起。此外,这些传感器需要一个超过100 d B的高动态范围(场景中高光和阴影的成像能力),使它们能够在各种光照条件下工作,并区分不同的对象。
有源传感器具有信号传输源,依靠飞行时间原理感知环境,飞行时间能够通过等待信号的反射返回来,测量信号从传输源到目标的传播时间,信号的频率决定了系统所使用的能量及其准确性。因此,确定正确的波长在选择系统时起着关键的作用。
有源传感器的类型主要有超声波雷达、毫米波雷达和激光雷达。
超声波雷达也称超声波传感器,利用声音导航测距。在有源传感器中,声波的频率最低(波长最长),因此声波更容易被干扰,这也意味着超声波雷达很容易受到不利环境条件的影响,如下雨和灰尘。另外,其他声波产生的干扰也会影响传感器的性能,需要通过使用多个传感器和依赖额外的传感器类型来缓解干扰。
毫米波雷达主要通过无线电波进行测距。无线电波以光速传播,在电磁波谱中频率最低,波长最长,基于无线电波的反射特性,毫米波雷达可以探测到前方物体之外的东西。不过,毫米波雷达信号容易被具有相当导电性的材料(如金属物体)反射,并且其他无线电波的干扰也会影响毫米波雷达的性能,造成毫米波雷达无法对物体进行探测。在确定被探测目标的形状方面,毫米波雷达的能力不如激光雷达。
激光雷达以脉冲激光的形式使用光。激光雷达能够以每秒50 000~200 000个脉冲的速度覆盖一个区域,并将返回的信号编译成一个3D点云,通过比较连续感知的点云、物体的差异检测其运动,由此创建一定范围内的3D地图。
3.环境感知传感器的要求
智能网联汽车需要从技术上对环境感知传感器进行判断和选择,筛选主要有以下条件。
(1)扫描范围,决定了传感器对被感知的目标做出反应的时间。
(2)分辨率,传感器可以为智能网联汽车提供的环境细节。
(3)视场角分辨率,决定智能网联汽车需要多少传感器来覆盖感知的区域。
(4)感知目标数量,能够区分3D环境中的静态目标和动态目标的数量,并且确定需要跟踪的目标数量。
(5)刷新率,决定传感器信息更新的频率。
(6)可靠性和准确性,传感器在不同环境条件下的总体可靠性和准确性。
(7)成本、尺寸和软件兼容性,这是环境感知传感器量产的技术条件之一。
(8)生成的数据量,它决定了车载计算单元的计算量,现在传感器偏向智能传感器,不仅是感知,还会分辨信息,把对车辆行驶影像最重要的数据传输给车载计算单元,从而减少其计算负荷。