Helicopter drones
Traditional helicopters do have some advantages. They can fly faster than multicopters (usually) and are more stable during forward flight (due to a tail fin and horizontal fins). They can also (sometimes) stay in the air longer, as they do not require the quick responsiveness of electric motors. Therefore, they can fly using combustion engines or even turbo-shaft engines, meaning they can carry more fuel and fly for longer. The following picture shows a US Navy helicopter drone:

However, traditional helicopters shift the pitch of their blades through the use of a swash plate. They also (usually) shift the pitch of their tail rotor blades using a similar method (albeit less complicated). A swash plate is basically two plates that rotate and move up and down the rotor shaft to alter the pitch of the blades. How does a helicopter tilt forward to start moving? The swash plate tilts and shafts going down to the swash plate make the blades bite into the air more at the back of the helicopter, and bite less toward the front (producing more downforce at the rear and less at the front).
All of these moving mechanical parts require lubing and maintenance between every flight. The more complex a machine is, the more opportunity there is for failure. So, although there are advantages to traditional helicopters the disadvantages (in terms of cost and maintenance schedule) make them a nonstarter for many.
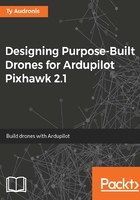
The following image shows how a swash plate works. The red disk remains stationary and rotates or moves up and down. Meanwhile, the beige parts turn with the rotor head and the aqua control rods shift the pitch of the blades depending on where they are positioned during their rotation cycle:

That's the end of helicopters for the purposes of this book. As there really is little difference between helicopters and multicopters for the purposes of our Pixhawk, we have chosen to cover multicopters in this book.