1.2.1 自动驾驶的核心问题
自动驾驶仍未实现大规模部署,主要因为目前的自动驾驶技术还不足以完全替代驾驶员的角色,无法承担车辆行驶过程所需闭环控制中枢的全部职能,特别是无法应急处置很多突发情况。那么,驾驶员具体担负了哪些职能?如何替代这些职能?在技术上如何实现?这些都成为实现自动驾驶的核心问题。
除了直接对车辆进行操控之外,驾驶员还要结合车辆自身状态判断路况信息并做出合理的决策。驾驶员驾驶车辆会产生两方面的消耗:一是操控车辆时在体力上的消耗;二是处理信息时在脑力上的消耗。近代车辆发展的重要方向之一是为驾驶员减轻负担:①不断改善操控装置,例如为减轻操作力量而加装的转向助力器、刹车辅助增压泵等;②不断提升驾驶舒适度,例如对座椅增加减震、调温及可调靠背设计,在车内安装高品质音响设备并主动降低噪声影响等;③不断增强驾驶安全性,例如加装宽视野防眩光后视镜、超声波倒车雷达等。这些传统的减负手段显然是针对减少驾驶员体力消耗而设计的,而对于减少驾驶员脑力消耗所发挥的作用并不明显。驾驶员的脑力消耗主要在应对、处理行驶过程中的各类信息上,这些信息主要来自车辆的交互界面和外部的行驶环境。发展自动驾驶技术的重要意义在于使用自动化系统替代驾驶员应对处理车辆内外部的信息,真正减少驾驶员的脑力消耗并大幅提升社会的整体出行效率,最终实现对驾驶员的完全替代。因此,自动驾驶的核心问题是通过自动化系统完全替代驾驶员来处理行驶过程中的相关信息,即对车辆行驶信息进行自动化处理。
车辆行驶过程中的信息处理十分复杂,其基本流程包括信息采集、信息传输、信息识别、信息决策和信息输出等环节。而在处理这些信息之前,需要知道的相关信息具体包括哪些?车辆行驶闭环控制系统中的基本参量是车辆的位置,位置参量是系统所需的主要信息,其他信息还包括车辆自身的显性参量和行驶环境的显性参量,以及车辆内部的隐性参量和环境的隐性参量。显性参量一般指驾驶员能够直接观测和感受到的信息,例如车速、车体方向、车内温度、附近的路面标线、红绿灯、行人、其他车辆等;隐性参量一般指驾驶员不能直接观测和感受到的信息,例如车内机电装置的状态、车辆轮胎的损耗情况、车外的风向和风速、超出视线等感知范围外的路况信息以及其他无法实时获取的环境信息等。
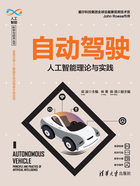
传统车辆行驶过程中,一般由驾驶员负责处理这些信息,例如驾驶员观察道路情况,根据车辆自身状况,按照规划路线操控车辆,最终完成车辆位置的变动。如图1.7所示,驾驶员直接参与对位置及其他显性参量的处理:驾驶员的感官负责信息的采集,驾驶员的身体和大脑负责信息的传输、识别和决策,驾驶员的四肢负责信息输出,最后借助车辆驾驶装置实现对闭环系统的稳定控制,即驾驶车辆。此外,有些导航辅助装置可以帮助驾驶员间接获取一些隐性信息(例如远方道路拥堵情况等),这些信息也会辅助驾驶员,为其提供决策参考,使部分隐性信息显性化。

图1.7 传统驾驶中信息处理过程的框图
从信息处理的角度划分,实现自动驾驶的自动化系统可以达到三个不同的层次:第一个层次是运用计算替代驾驶员处理车辆驾驶的相关信息,即替代驾驶员;第二个层次是将驾驶员接触不到的隐性参量信息也纳入计算过程之中,即超越驾驶员;第三个层次是突破传统的车辆构造和行驶方式,重新定义驾驶的含义,即颠覆现有车辆的形态。目前相关的产业技术研究和行业标准制定仍处于第一个层次,仍然在围绕着如何替代驾驶员的问题开展研究,而业界对车联网、车路协同方面的探索正在引导技术逐步进入第二个层次,第三个层次仅在科幻艺术作品中初露端倪,距离现实的生活仍遥不可及。